水果树高度约为80 cm至2 m的水果,利用深度学习可以达到约95%的识别率,采摘机器人会自动识别并收获。这个项目计划在两年内实现商业化。它的收获速度与人类差不多——每分钟可以采摘5个,每小时约300件。

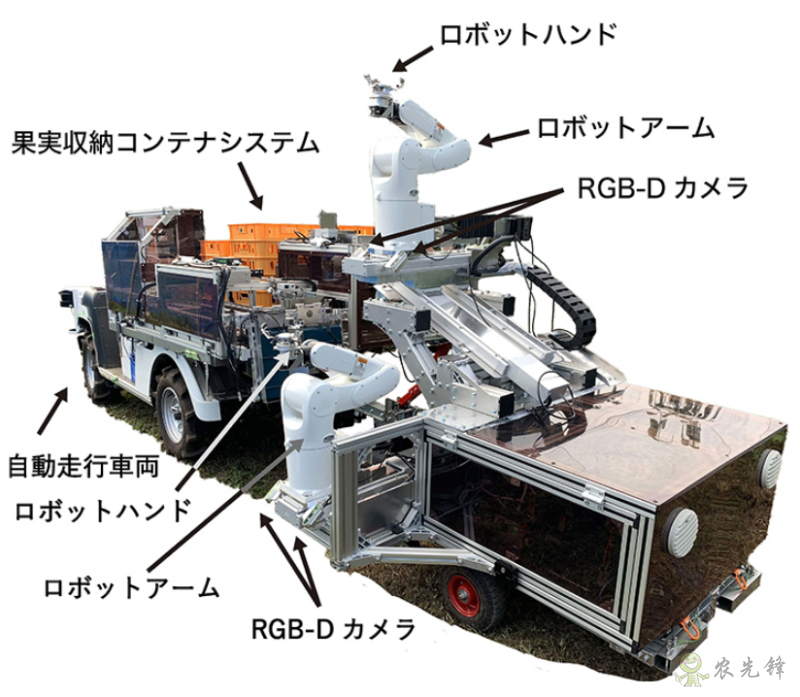
自动驾驶汽车牵引收割机器人和集装箱
这次宣布的机器人是采摘苹果、梨的模型。立命馆大学负责开发用于确定水果识别和收割时间的软件,电装则负责收割机器人的硬件开发。硬件的主要特征是前部是经过改装的雅马哈发动机电动高尔夫球车的“自动驾驶车辆”,后部是“用于收割的机器人臂和容纳收割的水果的容器系统”。
这次宣布的机器人是采摘苹果、梨的模型。立命馆大学负责开发用于确定水果识别和收割时间的软件,电装则负责收割机器人的硬件开发。硬件的主要特征是前部是经过改装的雅马哈发动机电动高尔夫球车的“自动驾驶车辆”,后部是“用于收割的机器人臂和容纳收割的水果的容器系统”。

前驱自动驾驶汽车是通过利用通用自动驾驶技术和传感器实现的,也可以将自动驾驶车辆与无人化学喷雾和割草结合使用。

另外,安装了两个基于工业机器人开发的机械臂,并且每个机械臂(RGB-D)装配了两个摄像头。这也用于区分水果、确定收割是否合适以及控制两个臂以免它们碰撞。
具体而言,首先在行进方向侧用照相机搜索要收获的水果。当发现水果时,它将停止命令发送到自动驾驶车辆并停止。
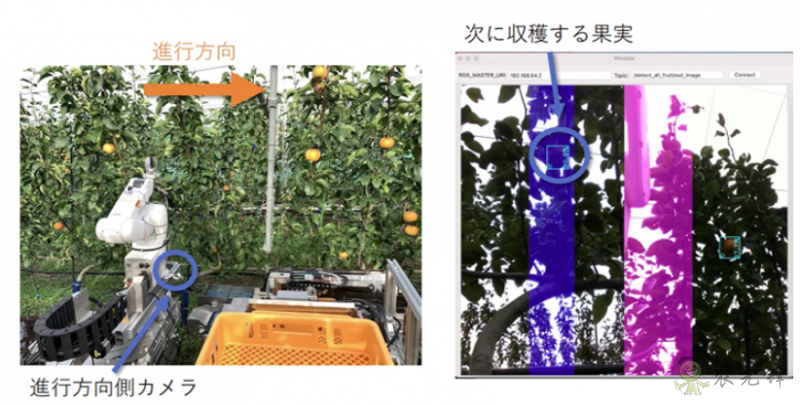
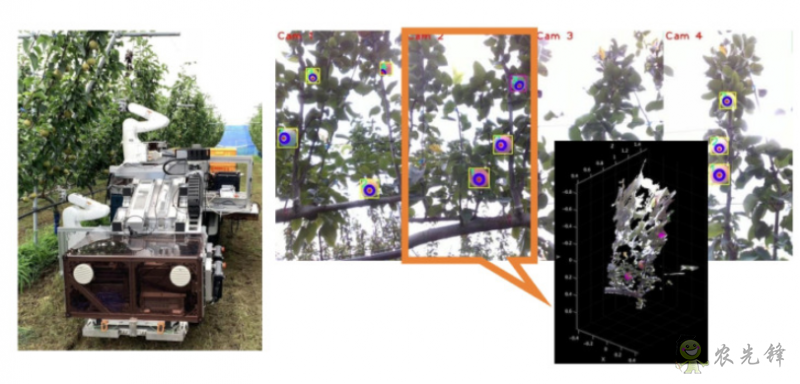
安装在机器人上的四个摄像头中的每个摄像头都通过深度学习来识别和区分水果。用RGB-D摄像机测量距离,以获取机器人到目标的距离。
水果也可以用于水果底部的凹痕的辨别,由于晒伤而引起的颜色变化很小,并且仅易于观察到由于成熟过程而引起的颜色变化。

收获的水果被送到水果储存容器系统。当容器装满水果时,可以继续自动收获,同时自动更换空容器。