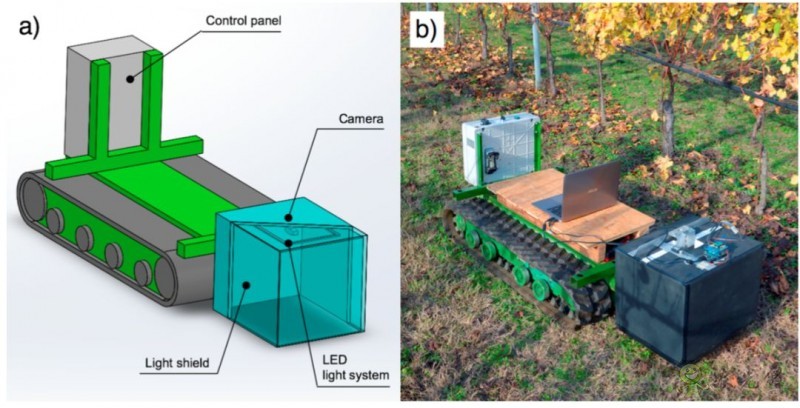
图1 本文所述机器人原型
本文提出了一种可靠、经济有效的单目视觉测程系统,该系统可用于农业地形上履带式车辆的定位和导航。本工作的主要贡献是设计和实现了一种基于互相关方法的增强图像处理算法。
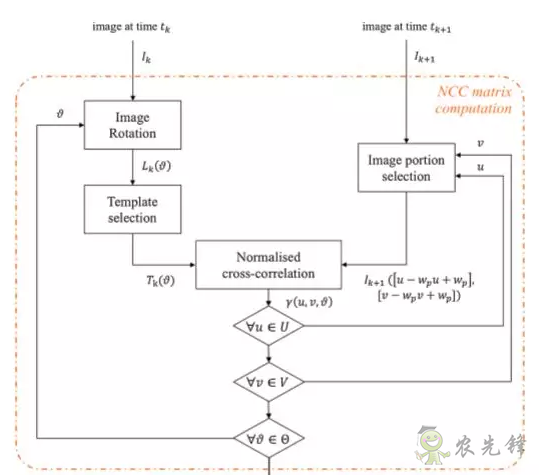
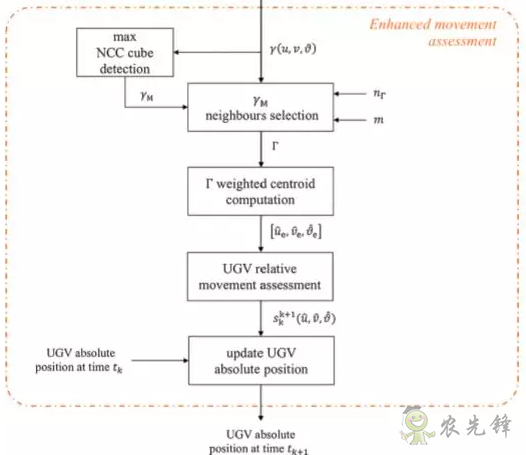
图2 增强VO算法框图
它是专门为使用一个简化的硬件和一个低复杂度的机械系统而开发的,并且不影响性能。通过提供子像素结果,该算法可以利用低分辨率图像,从而在较短的计算时间内获得较高的运动估计精度。通过对几种地形的现场试验,验证了该方法的有效性和适用于精确农业自动控制方案的适用性。
来源:
Zaman S, Comba L, Biglia A, et al. Cost-effective visual odometry system for vehicle motion control in agricultural environments[J]. Computers and Electronics in Agriculture, 2019, 162: 82-94.